
Hi there! I’m an Assistant Professor of Computer Science at Cornell. I lead the Praxis Lab, where we study how robots can learn to be robust and reliable in the real world.
I want to understand robustness in robot learning. My work integrates machine learning, numerical optimization, and control theory to study how robots can remain reliable when models, sensors, or hardware are imperfect. The goal is to develop robotic systems that can manage uncertainty, adapt, and improvise when deployed in messy real-world environments.
Prospective students: I'm looking for motivated PhD students to join my lab! Please see this note for more information.

🏅 November 2024: Our paper DROP won Outstanding Paper at the CoRL Workshop on Dexterous Manipulation!
🤖 June 2024: I’ve joined The AI Institute as a research scientist! Excited to work on contact-rich planning and 3D vision for dexterous mobile manipulation.
🎓 May 2024: Happy to announce I’ll be joining Cornell CS as an Assistant Professor in Fall 2025!
* denotes equal contribution.
DROP: Dexterous Reorientation via Online Planning
IEEE International Conference on Robotics and Automation (ICRA), 2024. Under Review.
Outstanding Paper, CoRL Workshop on Dexterous Manipulation
[paper] [project page] [code] [video]
Get a Grip: Multi-Finger Grasp Evaluation at Scale Enables Robust Sim-to-Real Transfer
Conference on Robot Learning (CoRL), 2024.
[paper] [project page] [code] [video]
Generative Modeling of Residuals for Real-Time Risk-Sensitive Safety with Discrete-Time Control Barrier Functions
IEEE International Conference on Robotics and Automation (ICRA), 2024.
[paper] [project page] [video]
Input-to-State Stability in Probability
IEEE Conference on Decision and Control (CDC), 2023.
[paper]
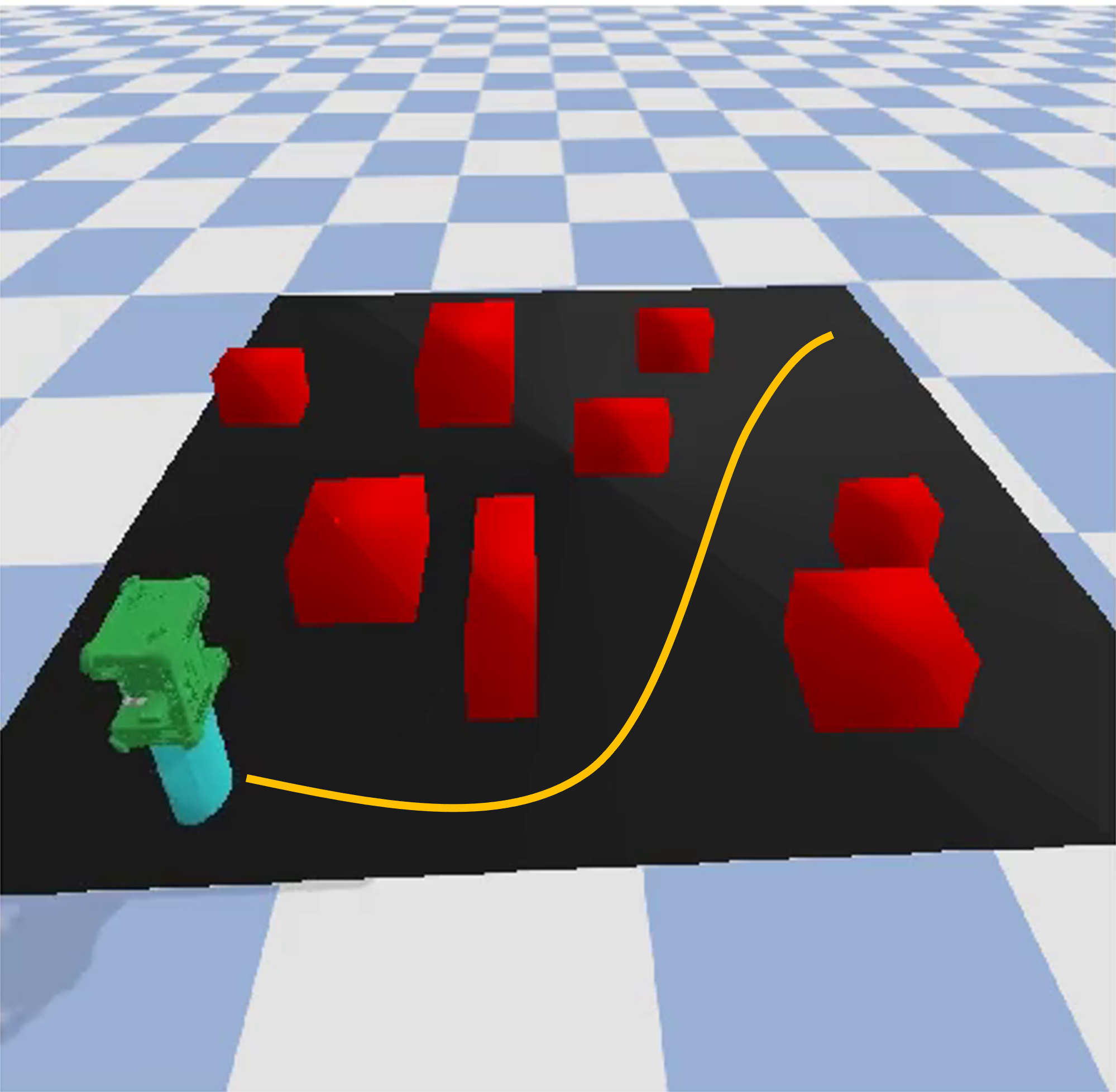
CATNIPS: Collision Avoidance Through Neural Implicit Probabilistic Scenes
IEEE Transactions on Robotics (T-RO), 2023.
[paper] [project page] [code]
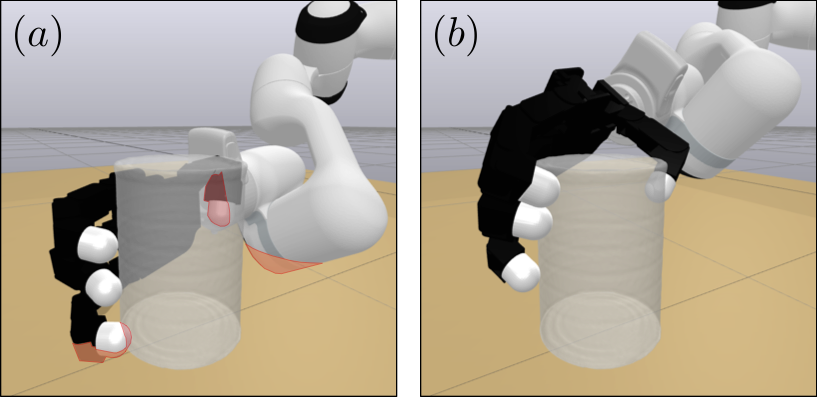
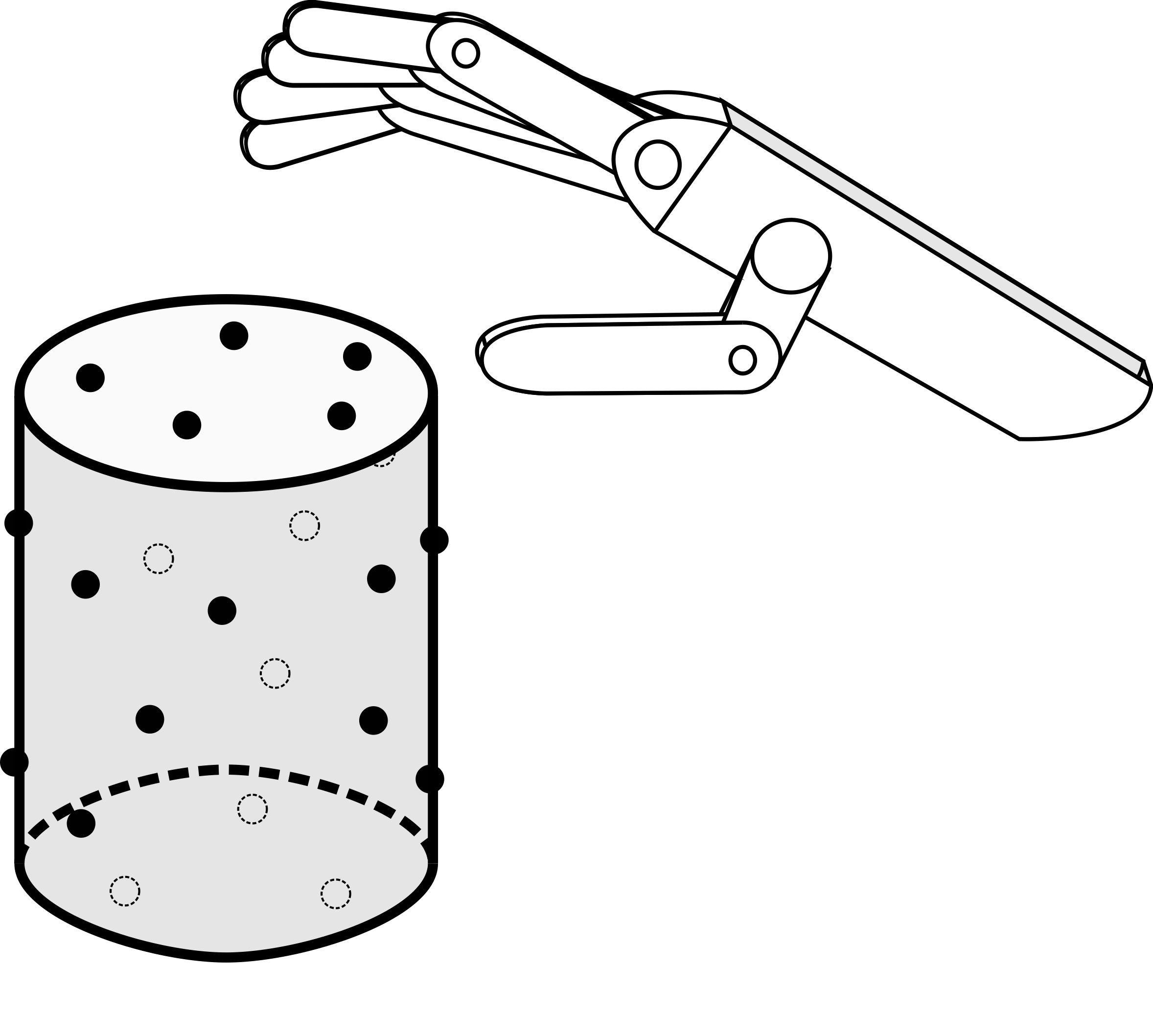
FRoGGeR: Fast Robust Grasp Generation via the Min-Weight Metric
IEEE/RSJ Conference on Intelligent Robots and Systems (IROS), 2023.
[paper] [project page] [code]
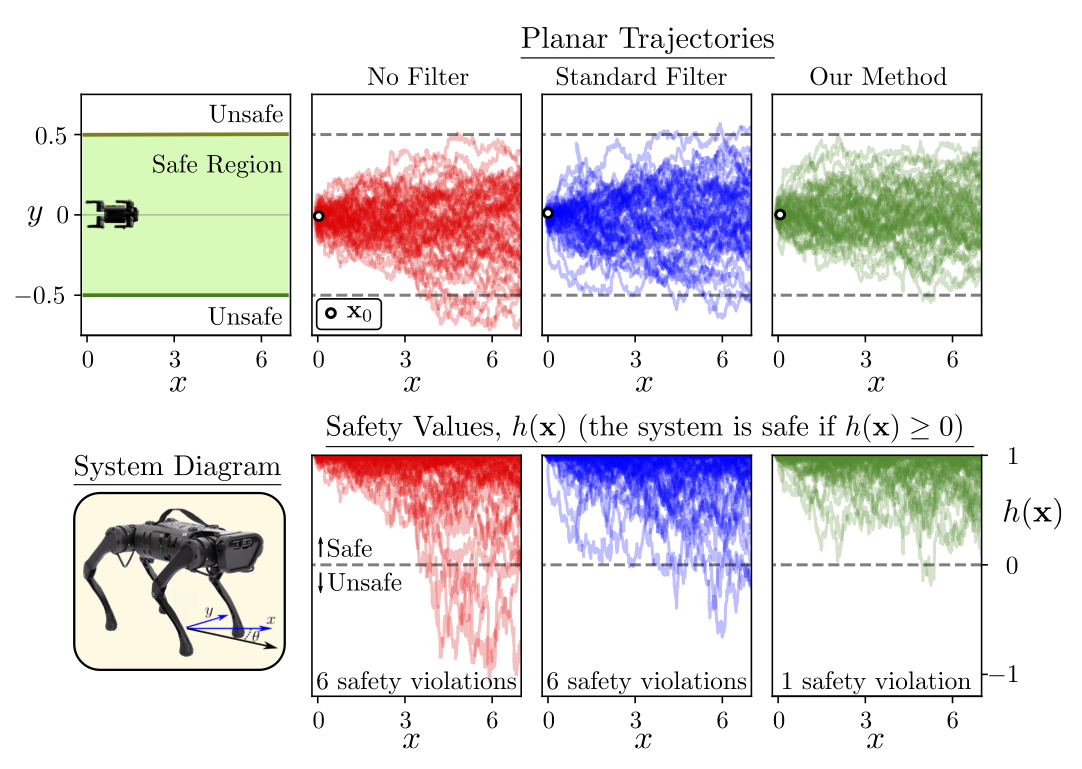
Robust Safety under Stochastic Uncertainty with Discrete-Time Control Barrier Functions
Robotics: Science and Systems (RSS), 2023.
[paper]
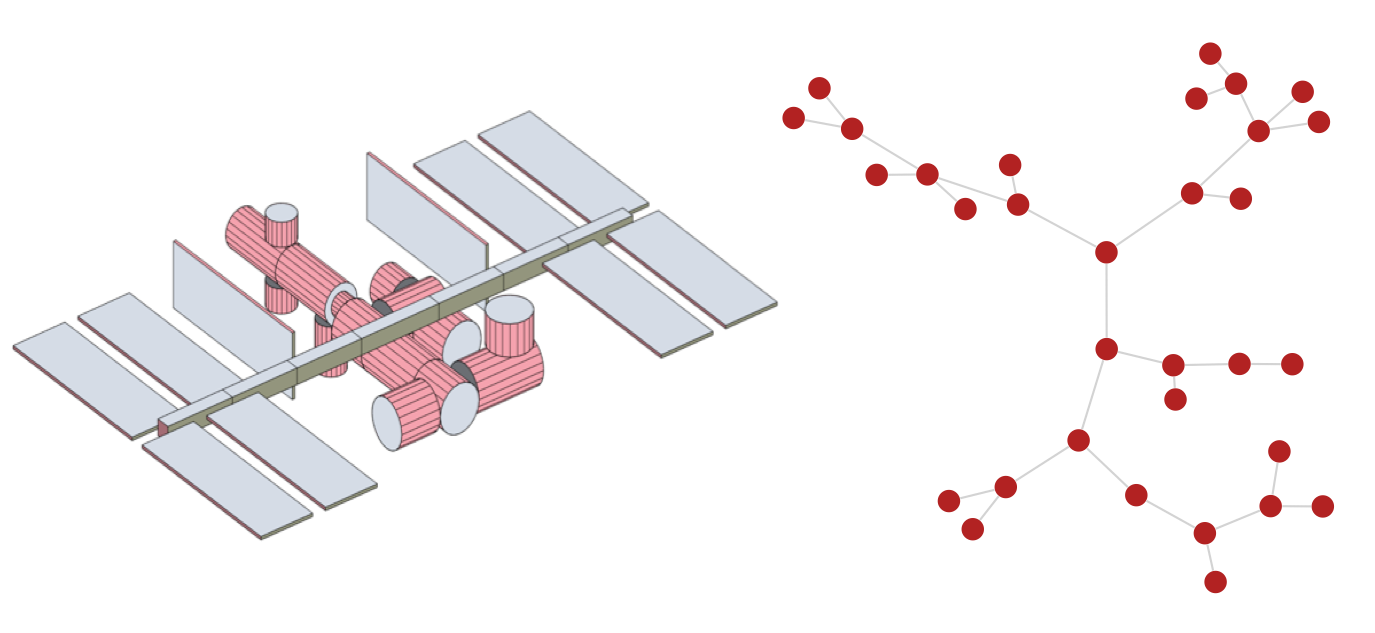
Multi-Robot Assembly Scheduling for the Lunar Crater Radio Telescope on the Far-Side of the Moon
IEEE Aerospace Conference, 2022.
[paper]
Vision-Only Robot Navigation in a Neural Radiance World
IEEE Robotics and Automation Letters (RA-L), 2021.
[paper] [project page] [code] [video]
CoCo: Online Mixed-Integer Control via Supervised Learning
IEEE Robotics and Automation Letters (RA-L), 2021.
[paper]
TrajectoTree: Trajectory Optimization Meets Tree Search for Planning Multi-contact Dexterous Manipulation
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021.
[paper]
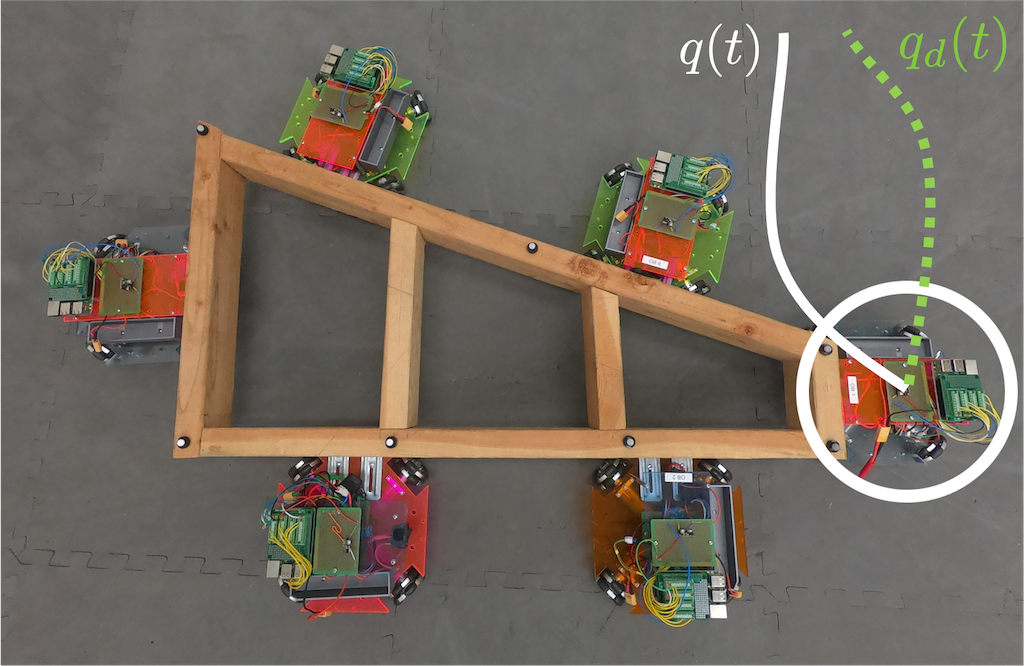
Decentralized Adaptive Control for Collaborative Manipulation
IEEE International Conference on Robotics and Automation (ICRA), 2018.
Best Manipulation Paper; Finalist, Best Multi-Robot Systems Paper.
[paper]
Simultaneous Active Parameter Estimation and Control Using Sampling-Based Bayesian Reinforcement Learning
IEEE/RSJ International Conference on Intelligent Robots and Systems, 2017.
[paper]
Current courses:
Past courses:
- AA273: State Estimation and Filtering for Aerospace Systems (TA)
- AA277: Multi-robot Control, Communication, and Sensing (TA)
Prospective PhD students
If you’d like to do a PhD in my lab, the best path is to apply through the Cornell CS PhD program or the Cornell Robotics PhD program. Please mention my name and specific research overlap in your application.
I get many inquiries and unfortunately can’t respond individually before the admissions process. You can read more about my group’s research here.
Cornell undergraduates and master’s students
If you’re interested in research with our lab, please send me an email that includes:
- Subject line:
[Research Interest] your_subject - Your CV
- A short note on specific topics in my lab that interest you
If there’s a good match, I’ll likely follow up with our interest form and possible next steps.
Current Cornell PhD students
If you’re already a PhD student at Cornell and are looking for an advisor, please feel free to reach out. Please send an email that includes:
- Subject line:
[Potential Advising] your_subject - A short description of your background and links to representative work
- Where you see overlap with my lab’s research
Right now, I can only advise students in the CS field. If I think there's a good match, I can reach out to set up a time to chat.
FAQ
- Should I email you about my PhD application?
- Unfortunately, due to the volume of inquiries, I usually can’t respond individually before the admissions process. If you’re admitted, please reach out — I’d be happy to find a time to chat.
- Which program should I apply to?
- I can currently advise students from both the CS PhD and Robotics PhD. If you apply through Robotics, make sure to list CS as your field of study (since that’s my field membership).
- What background do you look for in undergrad/master's researchers?
- Hands-on experience goes a long way — things like project teams, embedded systems, ROS, or mechanical prototyping. Coursework in robotics, control, or machine learning also helps.
- How can I get experience before applying to your lab?
- Join a student project team, take advanced robotics or controls courses, or build your own small projects. These are the best ways to prepare for research in our group.
- Are you recruiting postdocs?
- Not currently. I am planning to consider hiring postdocs once the lab is more established.
Social Justice + Broader Impacts:
Robotics is an ambiguous technology: it can liberate people from dull or dangerous work, but it can also deepen inequality and control. I believe roboticists should address this tension head-on, not only by advancing technical systems but also by shaping the narratives, institutions, and policies around them. I’m especially interested in collaborations—whether with students or colleagues—on position papers and research initiatives that engage these broader questions alongside the engineering.
Outside of robotics, my activism focuses mostly on issues around homelessness and housing, particularly in Los Angeles, where I lived until recently.
Hobbies
Outside of research, I spend my time baking, backpacking, climbing, and wrangling my raccoon cat Huxley.



